1 卷积神经网络
一篇很好的关于理解卷积神经网络的博客(博客中的filter助手表示的是卷积核的意思)
一篇关于如何搭建CNN的博客
知乎回答:能否对卷积神经网络工作原理做一个直观的解释?
机器视角:长文揭秘图像处理和卷积神经网络架构|该文原文
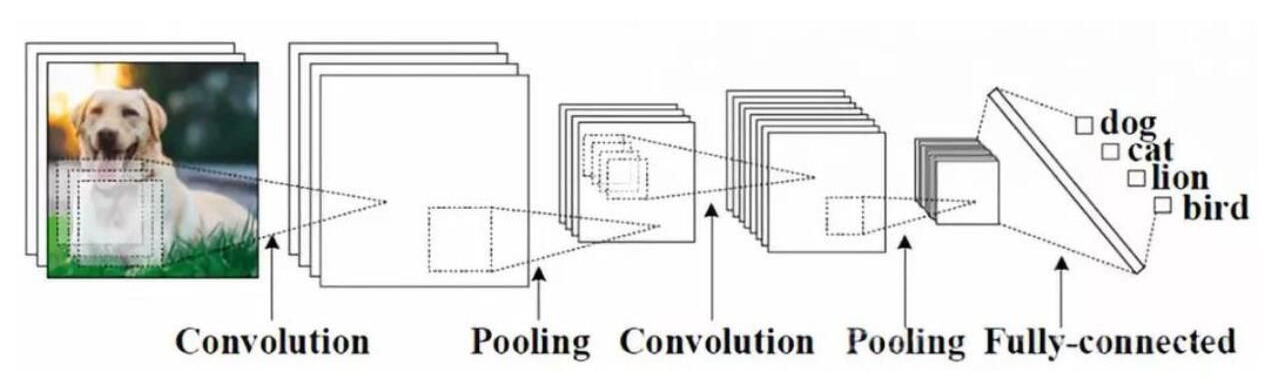
定义:卷积神经网络(Convolutional Neural Network,CNN)是一种前馈神经网络,它的人工神经元可以响应一部分覆盖范围内的周围单元,对于大型图像处理有出色表现。 它包括卷积层(convolutional layer)和池化层(pooling layer)
1.1 卷积神经网络的结构:
卷积神经网络的结构包括:
- 输入层(input,输入一张全尺寸的黑白或彩色图像)
- 卷积层(filter,对ROI(region of interest)进行特征提取,一个CNN可以有很多的卷积核也可以有很多的卷积层)
- 池化层(pooling,可选,目的是减少上层的输入参数)
- 输出层(也叫全连接层FC,该层可以用来对图像进行分类和识别操作)
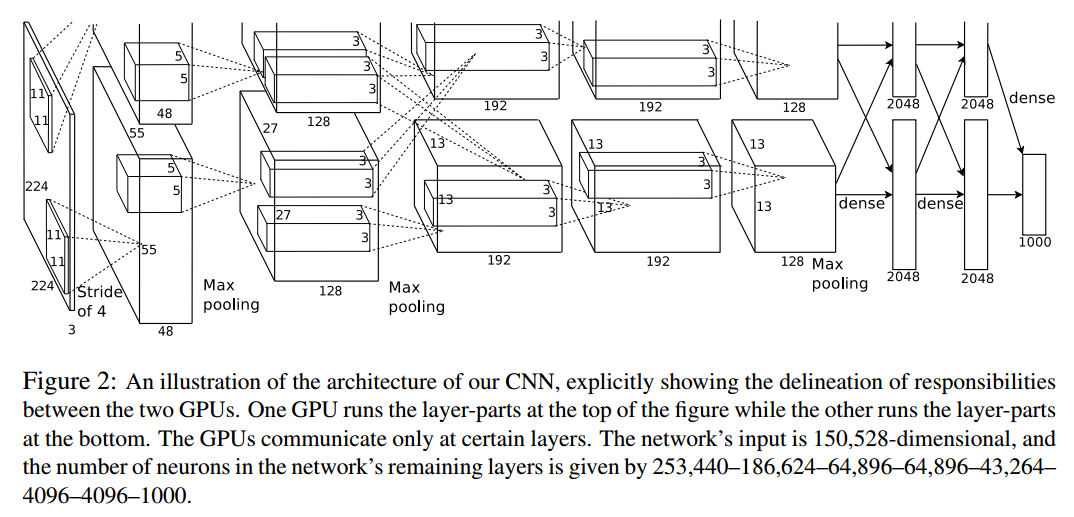
下面这张图是CNN的结构图:
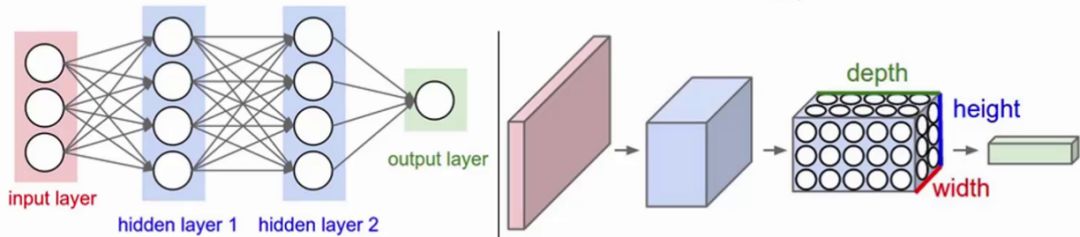
人工神经网络和卷积神经网络的对比:
左图:全连接神经网络(平面),组成:输入层、激活函数、全连接层
右图:卷积神经网络(立体),组成:输入层、卷积层、激活函数、池化层、全连接层
在卷积神经网络中有一个重要的概念:深度,它是指一幅图像的通道数量,如:RGB图像的深度是3,灰度图像的深度是1等
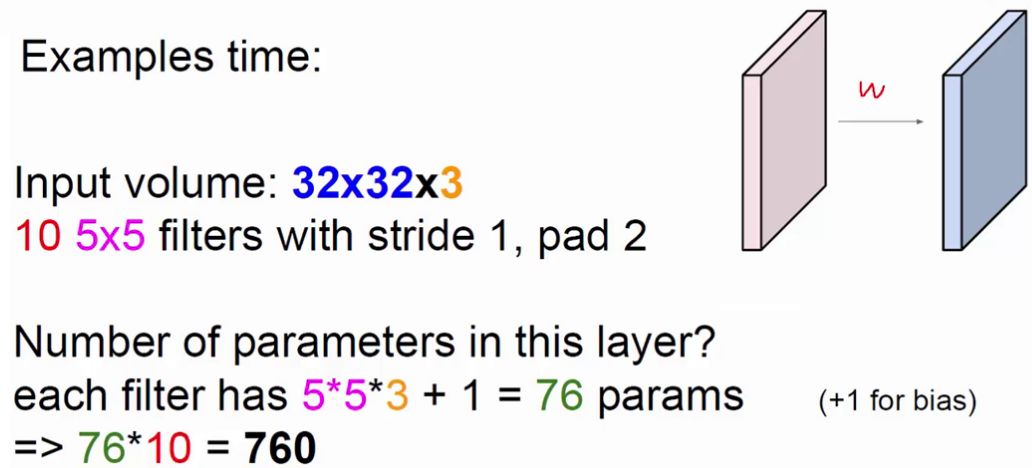
在卷积神经网络中,有一个非常重要的特性:权值共享: 所谓的权值共享就是说,给一张输入图片,用一个filter去扫这张图,filter里面的数就叫权重,这张图每个位置是被同样的filter扫的,所以权重是一样的,也就是共享。
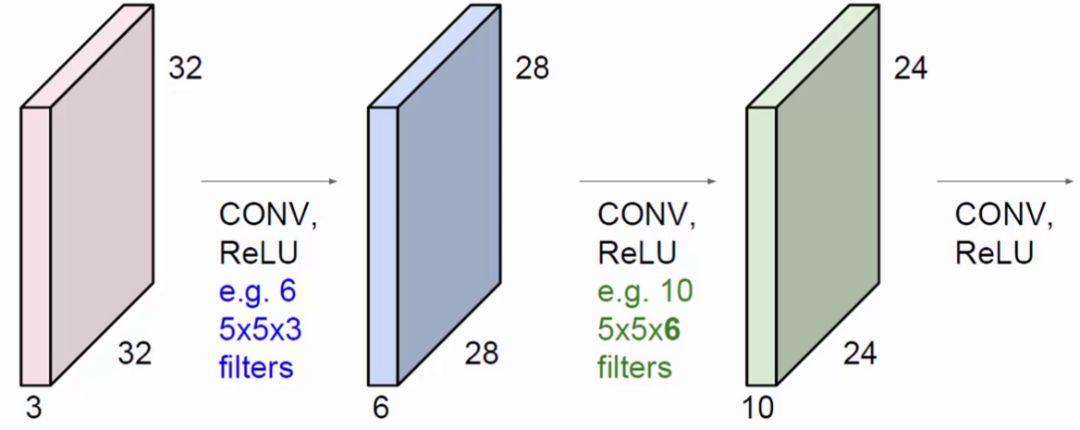
注意:特征提取之后,一般使用几个filter助手(卷积核)就会得到几个深度为1的feature map
卷积不仅限于对原始输入的卷积。蓝色方块是在原始输入上进行卷积操作,使用了6个filter得到了6个提取特征图。绿色方块还能对蓝色方块进行卷积操作,使用了10个filter得到了10个特征图。每一个filter的深度必须与上一层输入的深度相等。
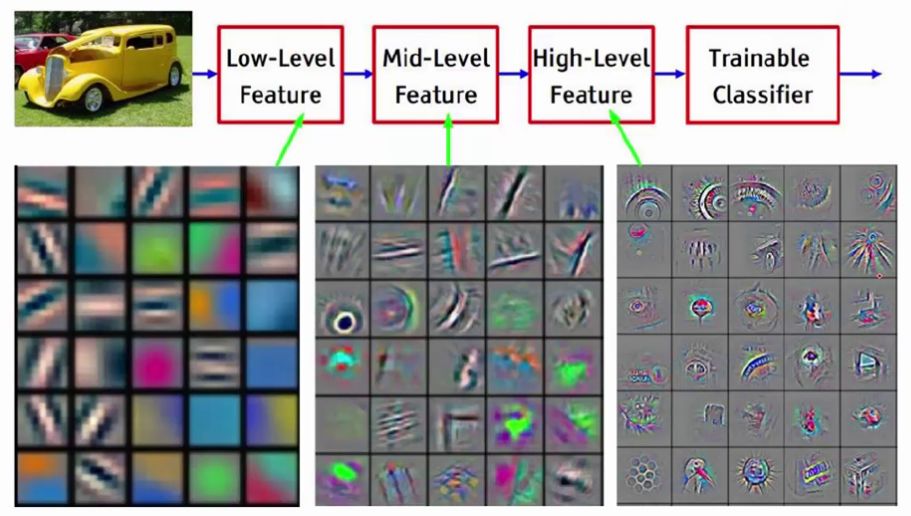
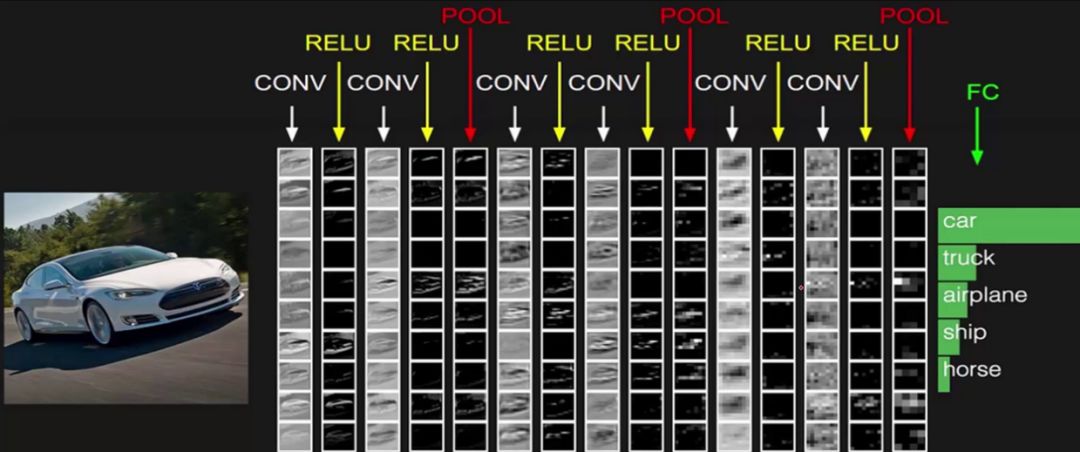
更加直观理解卷积:
以上图为例:
第一次卷积可以提取出低层次的特征。
第二次卷积可以提取出中层次的特征。
第三次卷积可以提取出高层次的特征。
特征是不断进行提取和压缩的,最终能得到比较高层次特征,简言之就是对原式特征一步又一步的浓缩,最终得到的特征更可靠。利用最后一层特征可以做各种任务:比如分类、回归等。
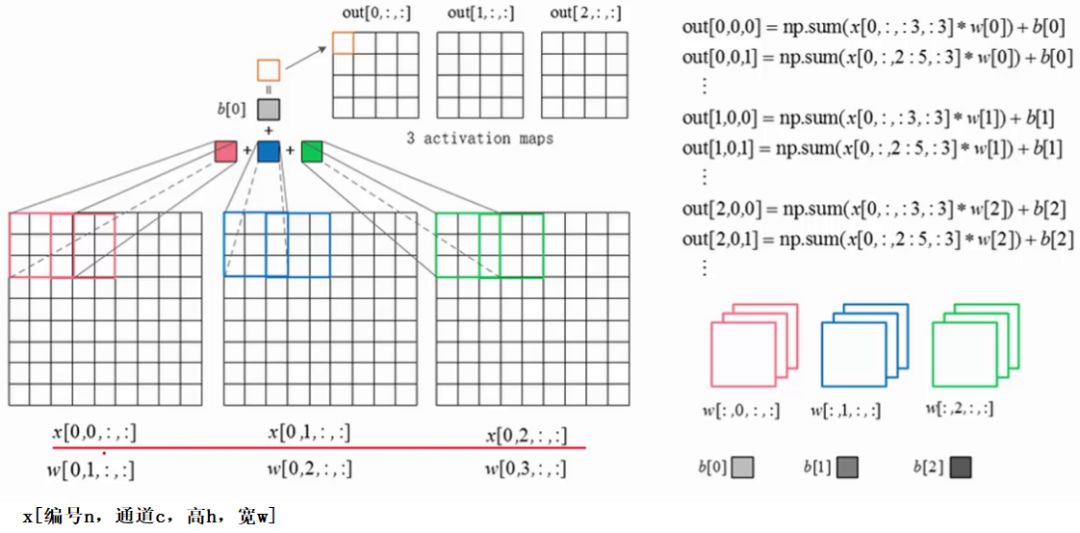
1.2 卷积的计算流程:
左区域的三个大矩阵是原式图像的输入,RGB三个通道用三个矩阵表示,大小为7x7x3。
Filter W0表示1个filter助手,尺寸为3*3,深度为3(三个矩阵);Filter W1也表示1个filter助手。因为卷积中我们用了2个filter,因此该卷积层结果的输出深度为2(绿色矩阵有2个)。
Bias b0是Filter W0的偏置项,Bias b1是Filter W1的偏置项。
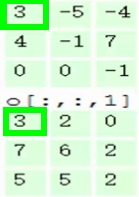
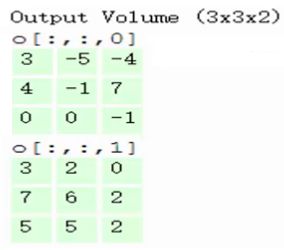
OutPut是卷积后的输出,尺寸为3x3,深度为2。
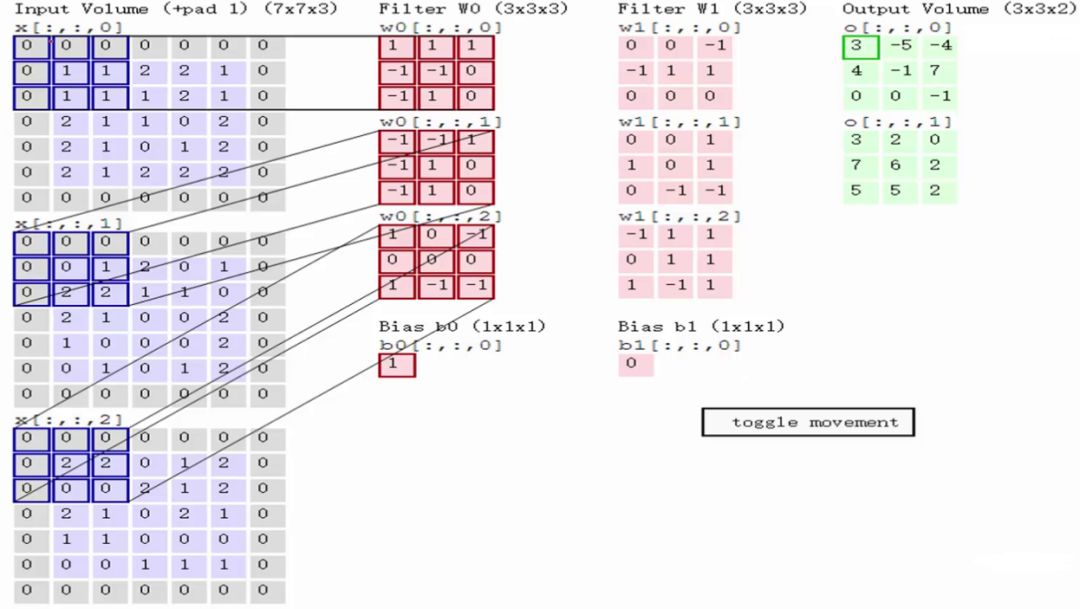
计算过程:
输入是固定的,filter是指定的,因此计算就是如何得到绿色矩阵。
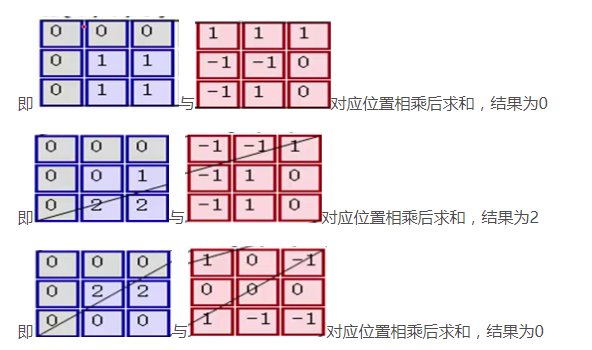
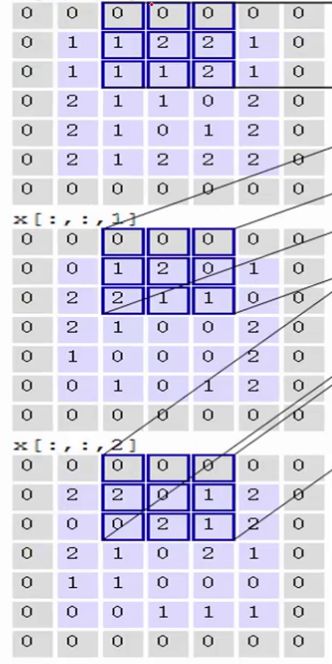
第一步,在输入矩阵上有一个和filter相同尺寸的滑窗,然后输入矩阵的在滑窗里的部分与filter矩阵对应位置相乘:
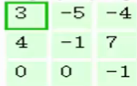
第二步,将3个矩阵产生的结果求和,并加上偏置项,即0+2+0+1=3,因此就得到了输出矩阵的左上角的3:
第三步,让每一个filter都执行这样的操作,便可得到第一个元素:
第四步,滑动窗口2个步长,重复之前步骤进行计算
第五步,最终可以得到,在2个filter下,卷积后生成的深度为2的输出结果:
思考:
- 为什么每次滑动是2个格子?
滑动的步长叫stride记为S。S越小,提取的特征越多,但是S一般不取1,主要考虑时间效率的问题。S也不能太大,否则会漏掉图像上的信息。
- 由于filter的边长大于S,会造成每次移动滑窗后有交集部分,交集部分意味着多次提取特征,尤其表现在图像的中间区域提取次数较多,边缘部分提取次数较少,怎么办?
一般方法是在图像外围加一圈0,细心的同学可能已经注意到了,在演示案例中已经加上这一圈0了,即+pad 1。 +pad n表示加n圈0.
- 一次卷积后的输出特征图的尺寸是多少呢?
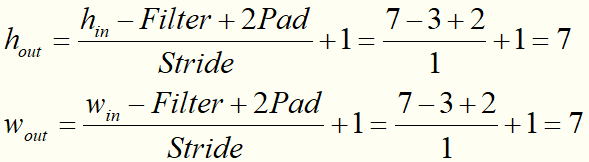
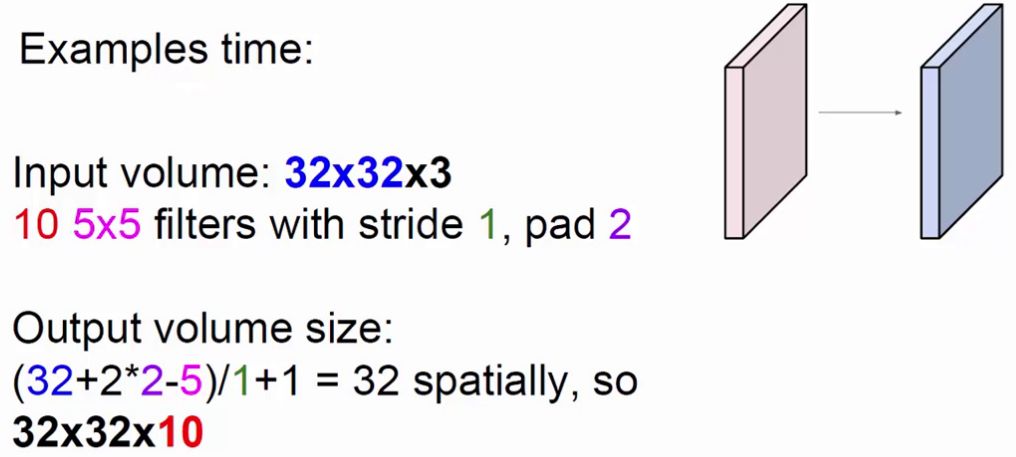
==注意:在一层卷积操作里可以有多个filter,他们是尺寸必须相同。==
1.3 卷积神经网络的组成:
卷积——激活——卷积——激活——池化——……——池化——全连接——分类或回归
1.4 前向传播与反向传播
1.4.1 前向传播
1.4.2 反向传播
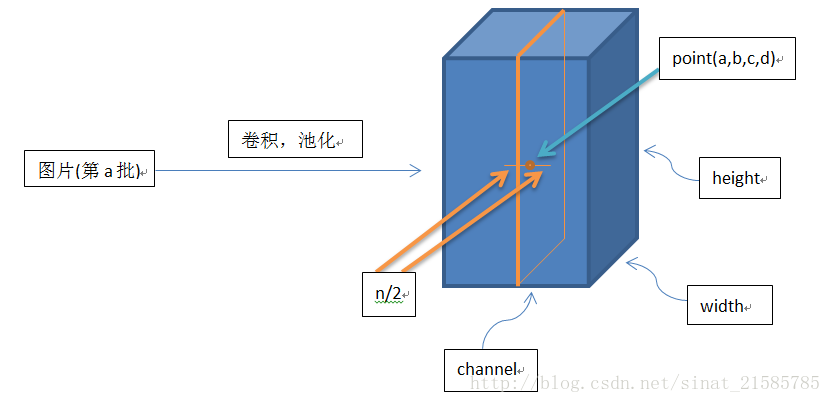
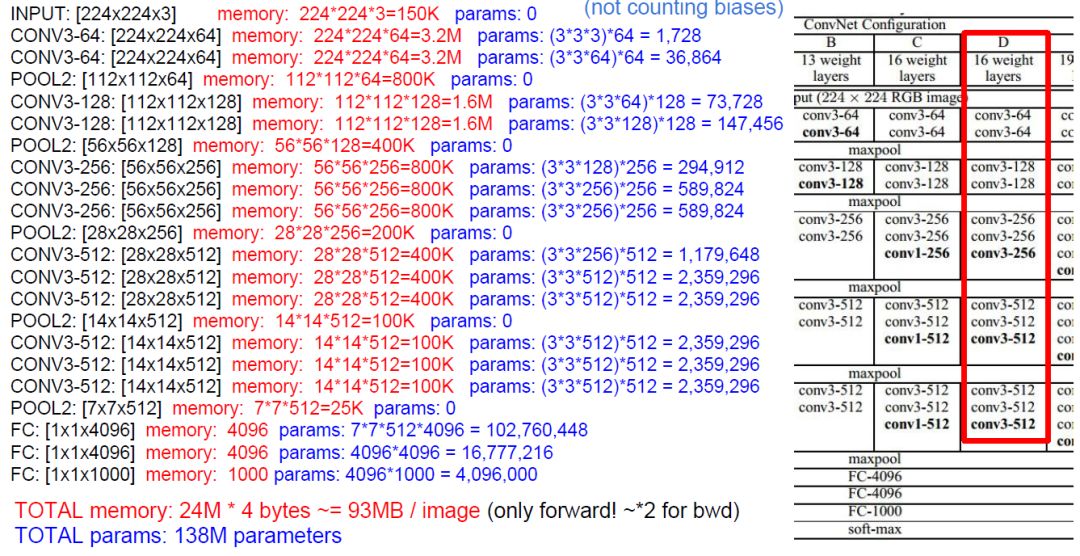
1.4.3 训练一个CGGNet需要的内存开销
1.2 残差网络(Residual Network)
论文出处:Deep Residual Learning for Image Recognition.pdf
残差网络是由来自Microsoft Research的4位学者提出的卷积神经网络,在2015年的ImageNet大规模视觉识别竞赛(ImageNet Large Scale Visual Recognition Challenge, ILSVRC)中获得了图像分类和物体识别的优胜。 残差网络的特点是容易优化,并且能够通过增加相当的深度来提高准确率。其内部的残差块使用了跳跃连接,缓解了在深度神经网络中增加深度带来的梯度消失问题
我们都知道增加网络的宽度和深度可以很好的提高网络的性能,深的网络一般都比浅的的网络效果好,比如说一个深的网络A和一个浅的网络B,那A的性能至少都能跟B一样,为什么呢?因为就算我们把B的网络参数全部迁移到A的前面几层,而A后面的层只是做一个等价的映射,就达到了B网络的一样的效果。一个比较好的例子就是VGG,该网络就是在AlexNex的基础上通过增加网络深度大幅度提高了网络性能。
对于原来的网络,如果简单地增加深度,会导致梯度弥散或梯度爆炸。对于该问题的解决方法是正则化初始化和中间的正则化层(Batch Normalization),这样的话可以训练几十层的网络。
虽然通过上述方法能够训练了,但是又会出现另一个问题,就是退化问题,网络层数增加,但是在训练集上的准确率却饱和甚至下降了。这个不能解释为overfitting,因为overfit应该表现为在训练集上表现更好才对。退化问题说明了深度网络不能很简单地被很好地优化。作者通过实验:通过浅层网络等同映射构造深层模型,结果深层模型并没有比浅层网络有等同或更低的错误率,推断退化问题可能是因为深层的网络并不是那么好训练,也就是求解器很难去利用多层网络拟合同等函数。
1.3 梯度消失
概念
在神经网络中,当前面隐藏层的学习速率低于后面隐藏层的学习速率,即随着隐藏层数目的增加,分类准确率反而下降了。这种现象叫做消失的梯度问题
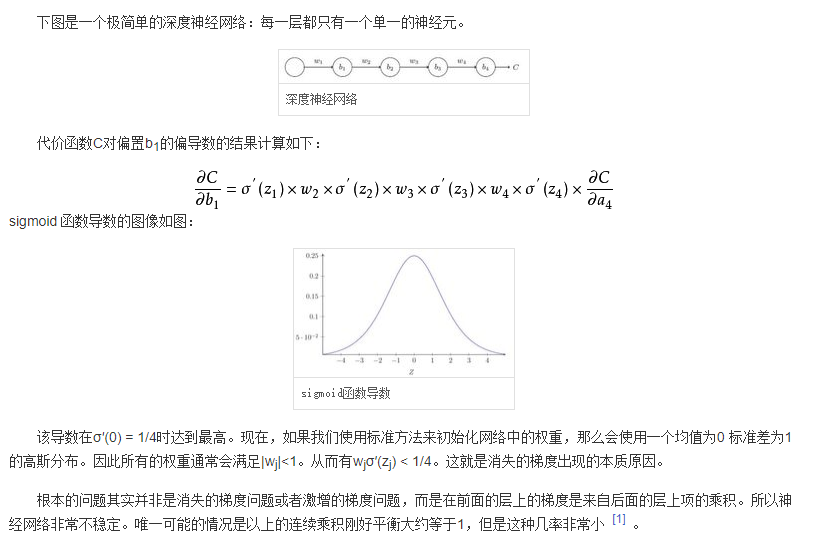
梯度消失产生的原因
1.4 梯度爆炸
梯度爆炸是梯度消失(梯度弥散)的对立面
1.5 梯度消失和梯度爆炸的解决方案
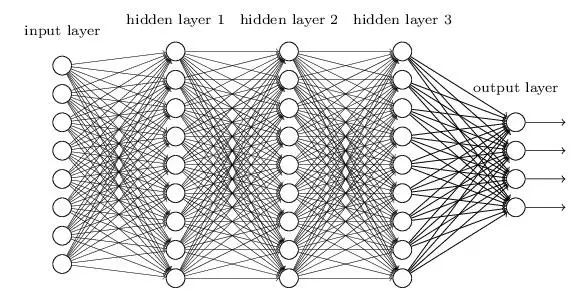
举个例子,对于一个含有三层隐藏层的简单神经网络来说,当梯度消失发生时,接近于输出层的隐藏层由于其梯度相对正常,所以权值更新时也就相对正常,但是当越靠近输入层时,由于梯度消失现象,会导致靠近输入层的隐藏层权值更新缓慢或者更新停滞。这就导致在训练时,只等价于后面几层的浅层网络的学习。
==梯度消失和梯度爆炸本质上是一样的,都是因为网络层数太深而引发的梯度反向传播中的连乘效应。==
解决方案:
- 换用Relu、LeakyRelu、Elu等激活函数
- ResNet残差结构
- BatchNormalization BN本质上是解决传播过程中的梯度问题
- LSTM结构 LSTM不太容易发生梯度消失,主要原因在于LSTM内部复杂的“门(gates)”,具体看LSTM基本原理解析
- 预训练加finetunning 此方法来自Hinton在06年发表的论文上,其基本思想是每次训练一层隐藏层节点,将上一层隐藏层的输出作为输入,而本层的输出作为下一层的输入,这就是逐层预训练。 训练完成后,再对整个网络进行“微调(fine-tunning)”。 此方法相当于是找全局最优,然后整合起来寻找全局最优,但是现在基本都是直接拿imagenet的预训练模型直接进行finetunning。
- 梯度剪切、正则
这个方案主要是针对梯度爆炸提出的,其思想是设值一个剪切阈值,如果更新梯度时,梯度超过了这个阈值,那么就将其强制限制在这个范围之内。这样可以防止梯度爆炸。
另一种防止梯度爆炸的手段是采用权重正则化,正则化主要是通过对网络权重做正则来限制过拟合,但是根据正则项在损失函数中的形式可以看出,如果发生梯度爆炸,那么权值的范数就会变的非常大,反过来,通过限制正则化项的大小,也可以在一定程度上限制梯度爆炸的发生。
2 卷积神经网络的实现
下面B站上的一个视频:
视频2:
可以参考一下该博客:卷积神经网络(CNN)详解与代码实现
写在最后
欢迎大家关注鄙人的公众号【麦田里的守望者zhg】,让我们一起成长,谢谢。
 wechat
wechat alipay
alipay bitcoin
bitcoin